



產品分類
- 電工電子電氣實訓設備
- 電力電子電機實訓裝置
- 過程控制實驗裝置
- 工業(yè)機器人智能制造
- 維修電工實訓設備
- PLC自動化實訓設備
- 數(shù)控機床實訓考核裝置
- 數(shù)控機床機械加工設備
- 機床電氣實訓裝置
- 機電一體化實訓設備
- 機械示教陳列柜
- 機械專業(yè)實驗設備
- 傳感器檢測實驗室設備
- 工業(yè)互聯(lián)人工智能實訓設備
- 特種作業(yè)操作實訓考核設備
- 物聯(lián)網(wǎng)實驗實訓設備
- 消防、給排水實訓設備
- 網(wǎng)絡布線實訓室設備
- 電梯安裝維修實訓考核設備
- 熱工暖通家電制冷實訓設備
- 樓宇智能化實訓設備
- 環(huán)境工程實驗裝置
- 流體力學實驗裝置
- 化工專業(yè)實驗實訓設備
- 新能源實驗實訓設備
- 電力供配電實訓設備
- 煤礦礦山實驗實訓設備
- 液壓氣動實驗室設備
- 教學仿真軟件
- 軌道交通實驗實訓設備
- 船舶實訓考核裝置
- 駕駛模擬訓練設備
- 新能源汽車實訓設備
- 汽車發(fā)動機底盤實訓臺
- 汽車電器電子實訓臺
- 特種車工程機械實訓設備
- 智能網(wǎng)聯(lián)汽車實訓設備
- 醫(yī)學教學模型
- 中小學實驗室設備
- 實驗箱.實驗儀
- 光電子通信實驗裝置
- 儀器設備.教學掛圖
更多新產品
- LGGY-BL22X型具身智能機器人實訓設備
- LGGY-BL21X型多機器人協(xié)同與視覺感知實訓生產線
- LGGY-BL20X型桌面式智能制造生產線
- LGGY-BL19X型多功能智能建造機器人系統(tǒng)
- LGGY-BL18X型視覺感知與工業(yè)機器人實訓平臺
- LGGY-BL17X型3D工業(yè)視覺檢測實訓平臺
- LGGY-BL16X型復合C型移動協(xié)作機器人實訓設備
- LGGY-BL15X型復合B型移動協(xié)作機器人實訓設備
- LGGY-BL14X型復合A型移動協(xié)作機器人實訓設備
- LGGY-BL13X型AI智能交互機器人實訓設備
- LGGY-BL12X型基于視覺的移動抓取機器人
- LGGY-BL11X型移動機器人應用開發(fā)平臺
- LGGY-BL10X型機器人大模型與視覺自動分揀生產線
- LGGY-BL09X型機器人大模型與視覺檢測生產線
- LGGY-BL08X型機器人大模型與視覺協(xié)同控制平臺
更多熱點產品
- 汽車透明整車模型、運輸車輛模型
- CLG-104型《電機與變壓器》示教陳列柜(CD解說)
- CLG-109《模具》示教陳列柜(CD解說)
- CLG-107型 機械綜合陳列柜
- CLG-102型 《機械零件》示教陳列柜
- LG-DCC型 機械振打袋式除塵實驗裝置
- LG-MFL01型 超濾微濾膜分離實驗裝置
- LG-NKS型 催化劑顆粒內擴散實驗裝置
- LG-CLDF型 多釜串聯(lián)實驗裝置
- LG-YY18C型 氣動與PLC實訓裝置(T型鋁槽單面)
- LG-YY18B型 透明液壓傳動與PLC實訓裝置(T型鋁槽單面
- LG-YYCS01型 液壓傳動與控制綜合測試實驗臺
- LG-DY01B型 電液比例綜合實驗臺
- LG-YYZN01型 智能型液壓綜合實驗臺
- LG-DLK01型 電力系統(tǒng)綜合自動化實驗平臺
當前位置:首頁 > 產品展示 > 高教職教設備 > 工業(yè)機器人智能制造 > 工業(yè)機器人智能制造
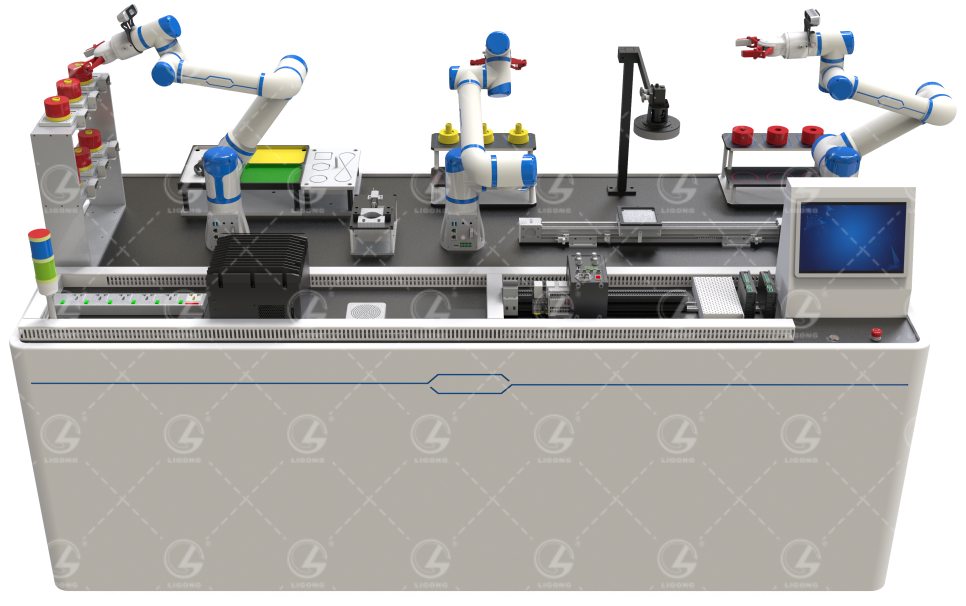
LGGY-BL21X型多機器人協(xié)同與視覺感知實訓生產線
品牌:理工偉業(yè) 咨詢電話:010-82827827 82827835
一、產品概述
本生產線采用3臺協(xié)作機器人、2套輸送系統(tǒng)、1套視覺系統(tǒng)、1套PLC電氣控制系統(tǒng),以微波爐磁環(huán)組裝生產線上的機器人上料、視覺檢測與引導、機器人組裝、搬運、入庫、倉儲管理等應用場景,以智能制造產線電子設備裝調、數(shù)據(jù)監(jiān)測、生產管控與運維為實施目標,可以完成電子設備組裝與調試、設計編程與參數(shù)配置、數(shù)據(jù)采集與可視化應用、生產過程數(shù)智化應用、電子設備數(shù)智化運維等多項實訓任務。另外,還在運算單元中完成了DeepSeek、Qwen等開源大模型的本地化部署,支持大模型技術開發(fā)、大模型+視覺、大模型+語音、大模型+機器人等多個行業(yè)場景的應用實踐。
二、功能與應用場景
1.開放性實驗環(huán)境
集成Python、OpenCV等運行環(huán)境,支持數(shù)字圖像處理、機器視覺等算法、硬件、應用的開發(fā)和學習;提供實驗所涉及的OpenCV圖像處理函數(shù)的所有接口和使用說明,既可通過配置參數(shù)實現(xiàn)對圖像的特定處理,也可新建不同的視覺項目,進行二次開發(fā);內置的視覺軟件和功能庫包括物體分類識別、目標檢測、OCR字符識別、缺陷檢測,滿足基礎應用與開發(fā)教學;支持對生產線上的目標尺寸測量、缺陷檢測、產品分類等應用進行開發(fā),開展企業(yè)級實戰(zhàn)訓練。
2.開放全部源代碼
開放全部軟件框架和算法級源代碼,支持二次開發(fā),提供完善的實驗指導書和技術文檔,并提供產品相關軟硬件的架構與設計方法文檔。
3.圖形化交互軟件
2D機器視覺軟件采用??低昖ision Master視覺軟件,圖形化交互界面,功能圖標直觀易懂,采用拖拽式操作,可快速搭建視覺方案,模塊運行狀態(tài)獨立標識,實時顯示。
4.部署本地大模型
完成了DeepSeek、Qwen等開源大模型的本地化部署,即部署于本機的運算單元中,除了可以開展大模型基礎應用的學習外,還可以利用大模型和配置的視覺、語音、機器人、傳感器等設備進行交互,面向如智能制造、智能家居、智慧農業(yè)等典型場景,開展應用實踐。
5.視覺定位、檢測與識別
視覺技術在實際應用中,通常有三個方向:定位(即計算目標位置,為機器人抓取提供引導)、檢測(即檢測目標的缺陷,如零部件劃痕、缺角等,用于進行良次品分類)、識別(即識別目標的名稱,如識別不同長度的螺桿,用于進行產品種類的分揀)。
6.機器人手眼標定
為機器人引入視覺系統(tǒng),使得機器人可進行自主的、智能化的運動,完成如零部件分類、物流搬運、碼垛、物體分揀等功能。
7.基于視覺的機器人應用
機器人與視覺系統(tǒng)結合,可以對不同尺寸、外觀的目標進行識別,開展目標分揀、智能碼垛、物體識別、字符識別等多種基礎實訓項目,從而模擬生產線上的真實產品檢測場景。
8.智能制造系統(tǒng)集成
本產品集成有3臺協(xié)作機器人、1條輸送線、1套2D視覺系統(tǒng)、2套深度視覺系統(tǒng),以及多組傳感器,所有組件均采用主流的通訊協(xié)議完成通訊,可以完成上料、輸送、視覺自主組裝、視覺檢測、下料等典型智能制造場景的全流程動作。
三、主要硬件參數(shù)
1.運算單元
采用一臺高性能計算機,預裝Linux或Windows操作系統(tǒng),部署DeepSeek、Qwen等開源大模型,并集成Python、OpenCV等運行環(huán)境,以及產品運行所需的全部軟件框架和SDK,支持數(shù)字圖像處理、機器視覺、機器人、大模型、電氣控制等硬件或應用的開發(fā)和學習。
2.協(xié)作機器人(完全開源)
協(xié)作機器人配置3臺,該機器人是專為教育科研開發(fā)的一款產品,融合AI大模型技術,且完全開源,在電機控制上,開放電機、控制器與機器人關節(jié)之間的控制源碼;在運動學算法上,開放底層運動學正逆解模型的源碼。通過全方位的開源,用戶可以從事機器人軟硬件層面的各類科研、開發(fā)工作。
3.2D視覺系統(tǒng)
2D視覺系統(tǒng)即一套標準工業(yè)級視覺系統(tǒng),包括工業(yè)相機、鏡頭、LED光源、光源控制器等,通過視覺支架進行集成,安裝于輸送線一側,為所有的靜態(tài)目標檢測、分析和處理提供實驗的硬件環(huán)境。
4.深度視覺系統(tǒng)
深度視覺系統(tǒng)采用1臺200萬像素深度體感攝像頭,安裝于機器人末端,用于目標的精確定位與機器人引導。攝像頭可兼容ubuntu,linux和樹莓派等操作系統(tǒng),兼容USB3.0接口協(xié)議,可進行深度信息感知、活體識別等。攝像頭內置立體深度算法,可實現(xiàn)更準確的深度感知及更遠的范圍。通過校準,立體深度感知的誤差率低至2%,在室內和室外環(huán)境中最遠可捕獲相距達10米的數(shù)據(jù)。
5.PLC控制系統(tǒng)
PLC控制系統(tǒng)采用國產匯川品牌的Easy521系列PLC,如下圖所示,用于生產線相關電子設備的數(shù)據(jù)監(jiān)控,以及輸送線、傳感器、氣缸等的運行控制。
其中,觸摸屏采用威綸通品牌的人機交互觸摸屏幕,通過與其他相關的硬件設備結合,實現(xiàn)生產線的數(shù)據(jù)采集、處理和控制的任務。
6.輸送線
輸送線采用1套直線滑臺模組,上方安裝有步進電機、接近傳感器、光電傳感器,通過PLC接入計算機,實現(xiàn)對模組的啟動、停止、暫停等控制,以及與視覺系統(tǒng)的協(xié)同等的控制,從而完成集成化系統(tǒng)運行時的全流程動作。
7.實訓與功能模塊
該生產線在功能設計上,既滿足基礎的機器人控制教學的需要,同時也滿足智能制造方向的機器人視覺感知、電氣控制、傳感器控制,以及更高層次的大模型+機器人應用的需求。
四、實驗(訓)項目
1 機器人原理與應用
(1)協(xié)作機器人機械結構組成
(2)協(xié)作機器人核心零件認知
(3)機器人不同坐標系的變換與應用
(4)機器人直線、曲線、圓形、方形等軌跡編程
(5)機器人搬運編程
(6)機器人碼垛編程
(7)機器人拆垛編程
(8)機器人抓取、分揀練習
2 機器視覺
(1)視覺系統(tǒng)認知
(2)像素尺寸測量
(3)物體定位和角度測量
(4)邊緣長度測量與面積檢測
(5)物體顏色和形狀識別
(6)條碼和二維碼識別
(7)OCR字符分割、訓練
(8)OCR字符識別
(9)基于形態(tài)學處理的產品表面缺陷檢測
(10)相機棋盤格標定
(11)基于opencv的車牌識別
(12)基于模板匹配的電子產品識別
(13)基于視覺的車牌識別
(14)基于視覺的條形碼識別
(15)基于視覺的二維碼識別
(16)基于視覺的物體形狀顏色識別
(17)基于視覺的水果識別
(18)基于圖像的NanoDet目標檢測模型實踐
(19)基于視覺的工件缺陷檢測
(20)基于視覺的證件識別
3 基于視覺的機器人應用
4 機器人柔性制造系統(tǒng)集成
5 數(shù)字孿生系統(tǒng)實訓
6 大模型技術基礎
7 大模型+視覺應用案例
8 大模型+語音應用案例